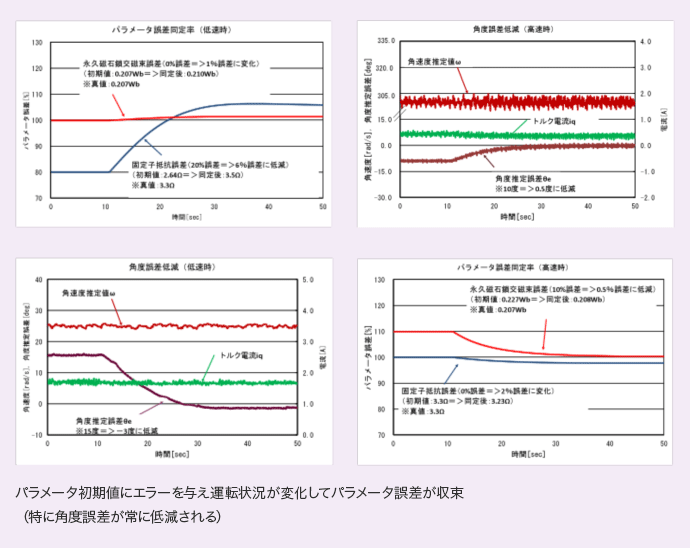
1. パラメータ同定
モータドライバの信頼性を向上させるためのモータパラメータ同定システムを開発しました。この技術は、 位置センサレス制御の場合に特に重要となります。
- 固定子抵抗の温度変化と永久磁石鎖交磁束の温度変化/個体差をオンラインで同定するシステムを実現。
- モータの運転状況が変化することにより、2つのパラメータを同時同定。
- DCインバータエアコン用コンプレッサドライバに量産実装され、現在も生産中。
今後の動向
位置センサ付きの制御に応用した場合は、エンコーダ角度位置オフセットなど、様々な制御誤差要因を同定することも可能となります。
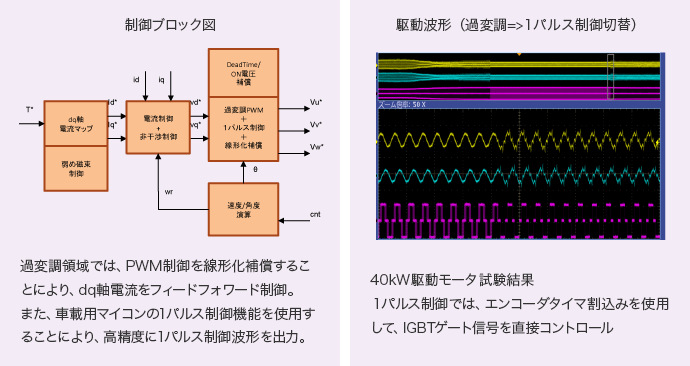
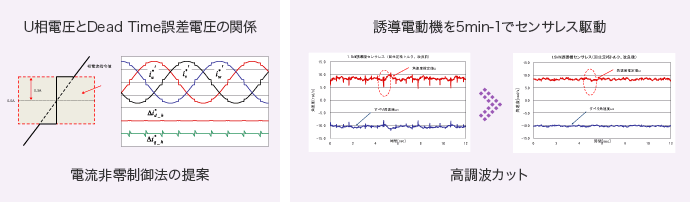
2. デッドタイム補償
電流波形歪みやトルクリプル低減のために、デッドタイム補償はなくてはならない技術です。位置センサレス制御を行う場合には特に重要です。
- デッドタイムによる電圧誤差波形の抽出方法を確立。
- 低速域におけるデッドタイムの影響を最小限に抑える電流指令値生成方法を確立。
今後の動向
電圧誤差パターン 自動測定化/自動実装の実現
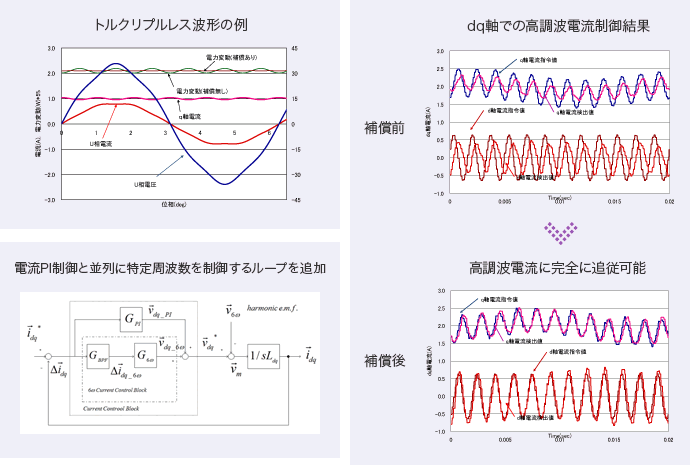
3. トルクリプル低減波形制御
モータ電圧高調波は、トルクリプルを発生します。従来の電流制御では追従できない高調波電流に対してバンドパスフィルタによる電流制御を行うことにより、トルクリプルが最小となる電流制御を実現しました。
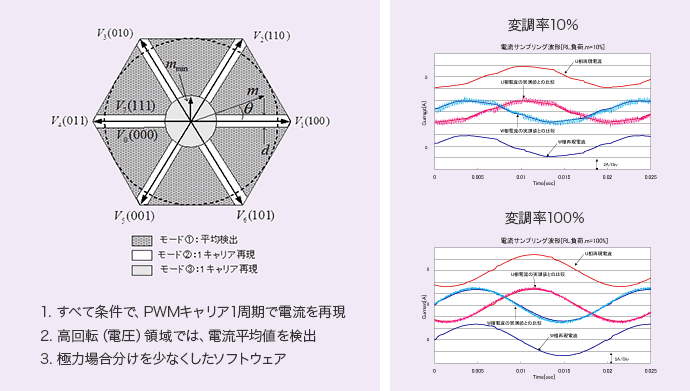
4. 1シャント電流検出の高性能化
1シャント(1-Shunt) 電流検出は、検出が困難な領域が存在するため、高調波ノイズや電流波形歪みの発生を抑えることが困難でした。当社はこれらの問題を解決し、車載用モータやファンモータドライバ等への適用を可能にしました。
今後の動向
16ビットマイコンなどの低コストソリューション対応(ルネサス製RL78/G14で既に実現)